Machine vision applications are as diverse as the 3D sensor technologies that enable those. Structured light camera systems are a preferred solution when precision is required, but neither high frame rates nor color information are needed. Stereo vision, on the other hand, is the preferred technology when measurements are to be made in daylight and/or over long measurement distances, but it has difficulties with textureless surfaces.
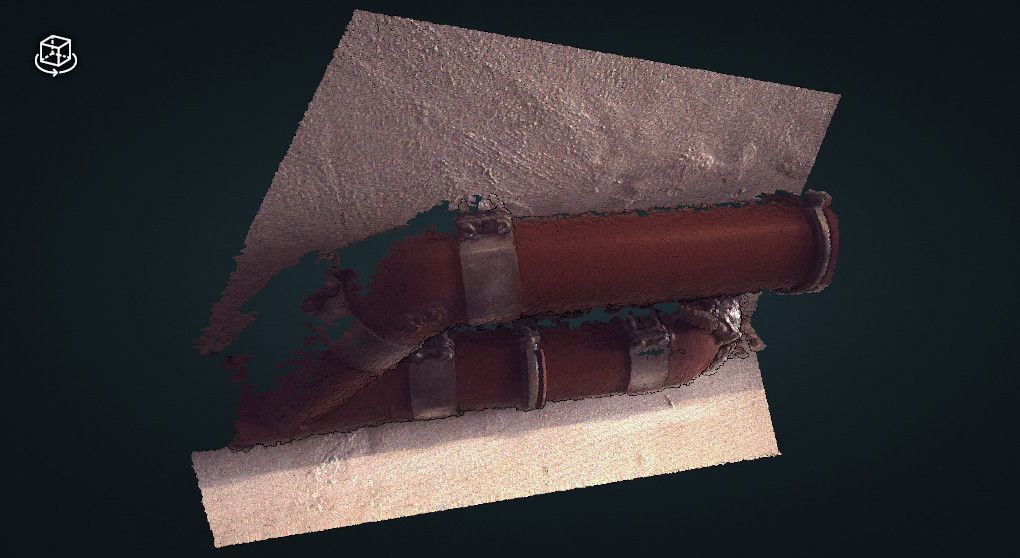
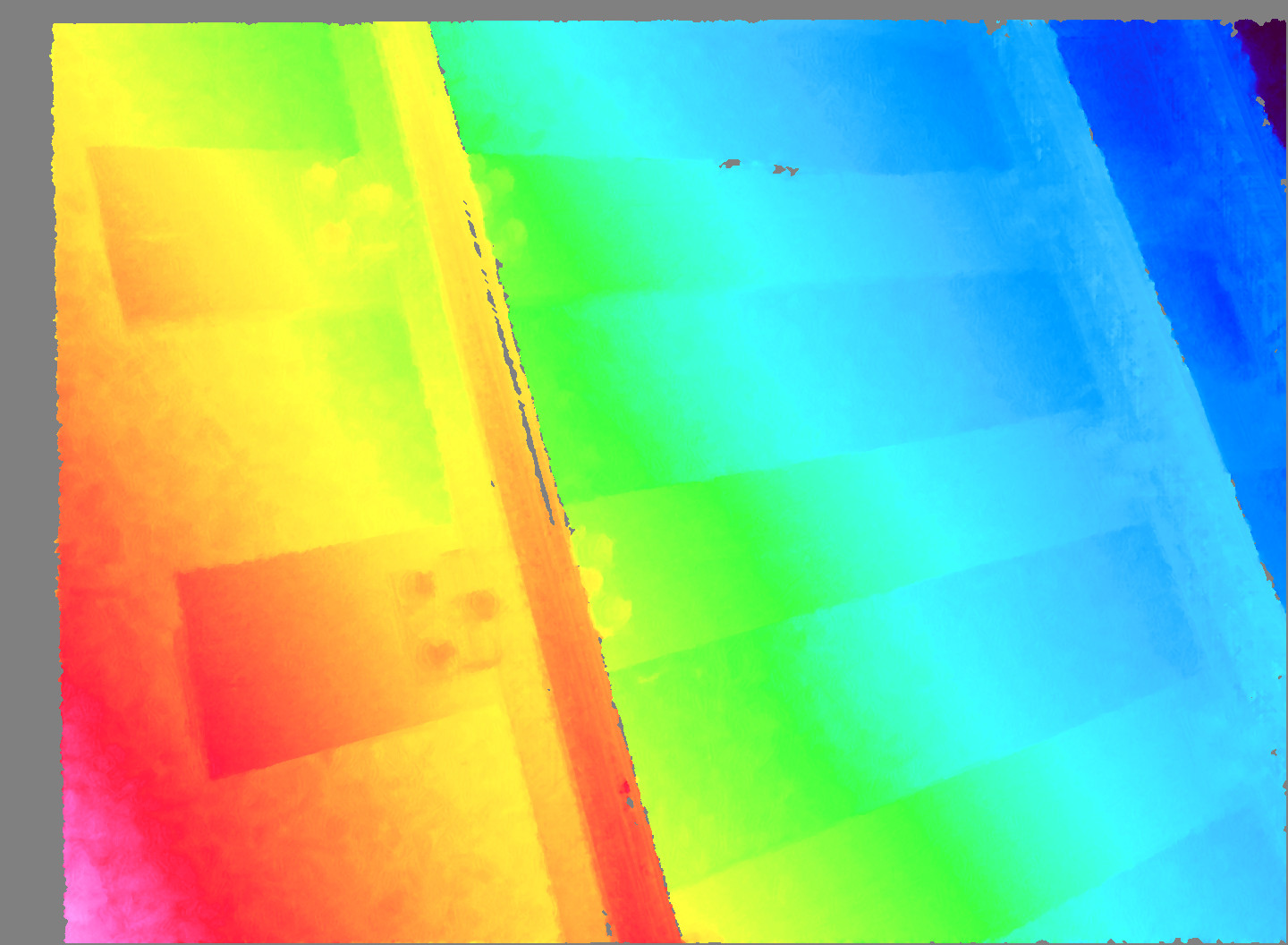
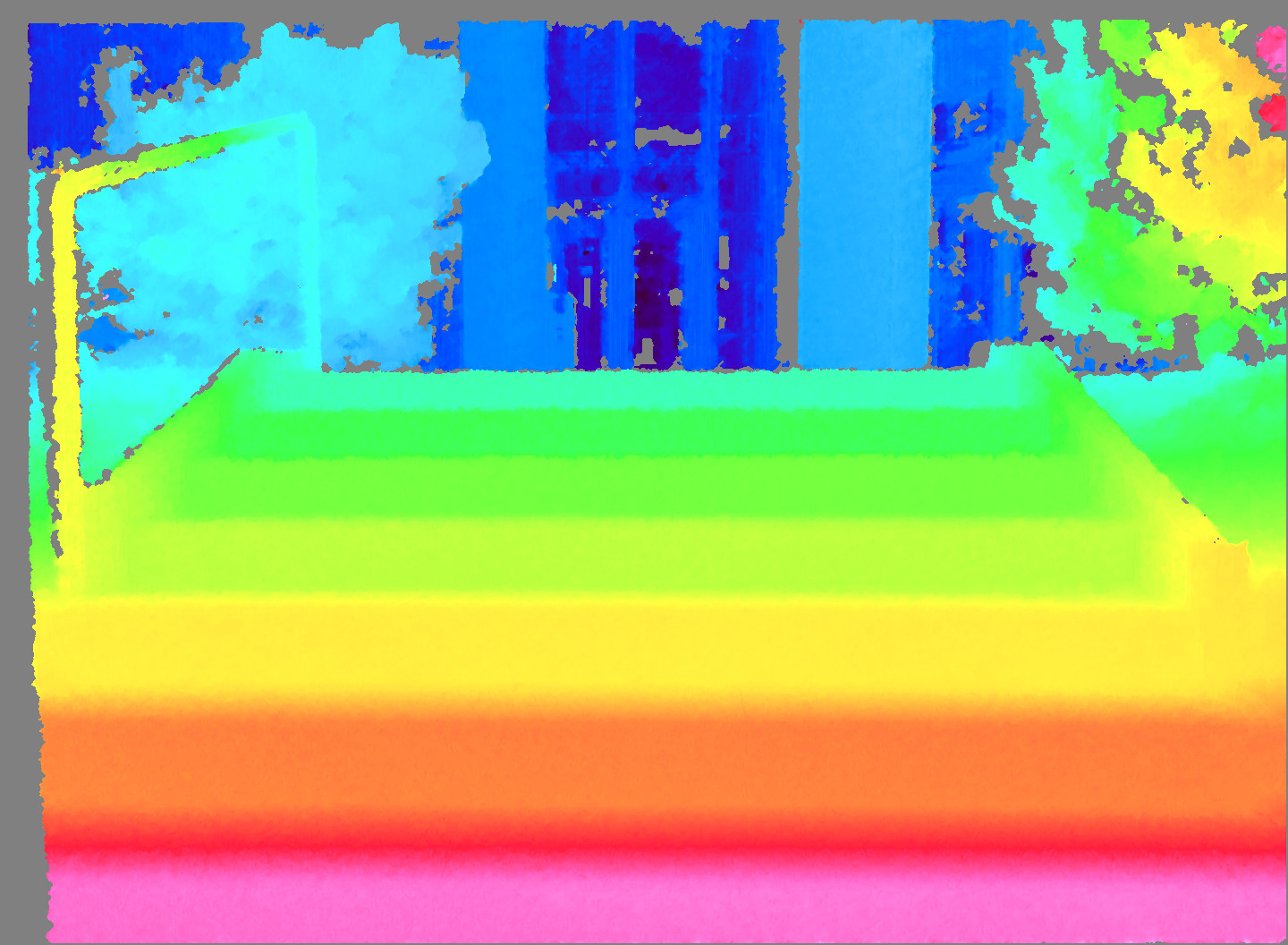
Our new Ruby 3D depth camera combines the best features of the aforementioned 3D vision technologies: stereo vision and structured light. The depth camera has three image sensors: two monochrome sensors for depth perception and an additional color sensor. In addition, an infrared pattern projector has been integrated, which improves depth perception but is invisible to the color sensor.
This makes our Ruby 3D depth camera one of the most flexible 3D vision solutions at a very affordable price!